
- полный
- Название продукта
- ключевое слово
- Модель продукта
- Краткое описание продукта
- Описание продукта
- Полнотекстовый поиск

 |
















| Количество: | |
|---|---|
SLJ-150C
Описание продукта
Базовая информация.
| Condition | Новый | Приложение | Использование для обработки тюков хлопка в текстильной промышленности. | |
| Тип | Манипулятор с зажимным приспособлением | Емкость | 50-500 кг, по индивидуальному заказу | |
| Ход вверх и вниз | 0-2000 мм, по индивидуальному заказу | Рабочий радиус | 2500-3000 мм, по индивидуальному заказу | |
| Максимальная высота | 3500 мм, по индивидуальному заказу | Основной дизайн | Зажим, подъем, вращение | |
| Форма установки | Индивидуальные | Спецификация | Индивидуальные | |
| Транспортный пакет | Деревянная коробка | Источник | Китай | |
| Товарный знак | Эскотт, или по индивидуальному заказу | Производственная мощность | 100 шт/месяц |
Общее введение
Мы являемся ведущим китайским производителем, специализирующимся на производстве манипуляторов, интеллектуального и полуинтеллектуального погрузочно-разгрузочного оборудования.У нас более 10 лет опыта.
Промышленный манипулятор — это тип вспомогательного оборудования, разработанного с использованием принципов динамики и эргономики.Управление им осуществляется вручную с помощью кнопок с использованием приспособлений для перемещения объектов.
мы представляем манипулятор как полезный инструмент для манипуляций.Он эффективно перемещает нестандартные, тяжелые и специальные предметы, тем самым экономя и защищая рабочую силу.В результате его все чаще используют в процессах промышленного производства.
Промышленные манипуляторы имитируют движения человеческих рук для захвата и переноски товаров, что позволяет эффективно сократить рабочую силу и снизить затраты на рабочую силу.
Все наши решения представляют собой индивидуальные нестандартные конструкции, полностью отвечающие различным потребностям каждого клиента и изготавливаемые по индивидуальному заказу.Высота, вылет, ход подъема, грузоподъемность, внешний вид, цвет и форма установки оборудования настраиваются в соответствии с пространством и потребностями объекта.В то же время система зажима будет полностью нестандартизирована и настроена так, чтобы максимально подходить для перемещения заготовок.
Эскиз дизайна для различных видов нагрузок
 |  |
 |  |
Описание Рабочий объект
Заказчиком данного оборудования является известный японский производитель подгузников.Промышленные роботы используются для перемещения больших тюков хлопка.Мы установили специальный пневматический зажим на руку робота и управляли рукой робота и его зажимом с помощью кнопок на панели для транспортировки тюков хлопка на сборочной линии.Наши роботы закупаются большим количеством отечественных компаний, а также экспортируются за границу.
Мы настраиваем нашу продукцию для полного удовлетворения изысканных потребностей каждого клиента.Высота, размах стрел, ход подъема, грузоподъемность, цвет внешнего вида, форма установки и т. д. оборудования настраиваются в соответствии с пространством и потребностями объекта.Система зажима будет полностью адаптирована к потребностям обработки заготовок.
Некоторые другие типы приспособлений для справки.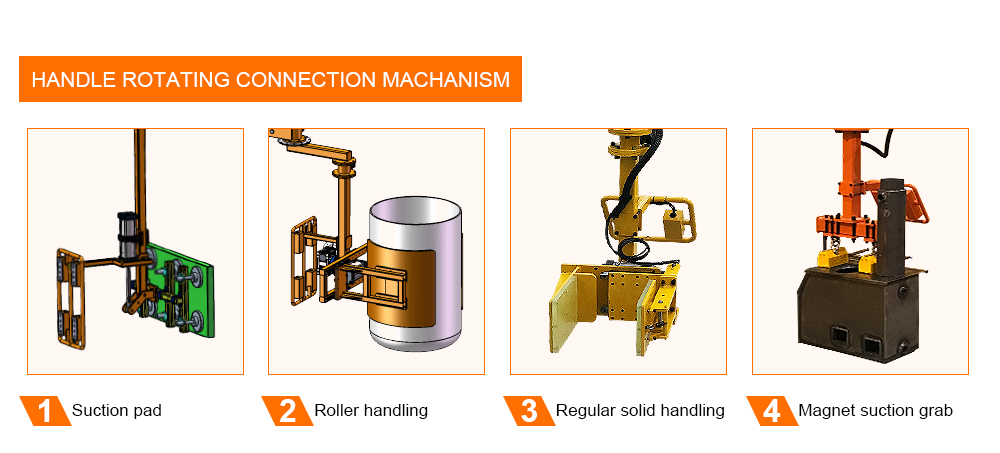
Способ установки
Каждая установка имеет свои преимущества и полностью зависит от потребностей проекта и условий работы мастерской клиента.
1. Фиксированная колонка: самый лучший выбор
2.Подвижная колонна
3. Фиксированные накладные расходы (настенная установка)
4. Перемещение над головой (с помощью выдвижной тележки)
Руководство по эксплуатации продукта
1. Базовая конструкция: оборудование можно свободно поднимать и вращать на 360 градусов, что может завершить трехмерное пространственное перемещение нагрузки во время захвата, обработки, подъема и стыковки заготовки, а также может удовлетворить требования по извлечению материала.
2. Рабочая платформа: оснащена системой управления нагрузкой, захват, транспортировка и извлечение материала могут осуществляться с помощью кнопки управления;Механический захват должен обеспечивать плавный захват, перемещение и выгрузку заготовки.
3. Защитная защита: оснащена устройством защиты от неправильной эксплуатации (работа не на месте, заготовка не может быть выгружена), вспомогательной системой контроля безопасности (манипулятор не будет быстро подниматься и падать из-за неправильной работы), тормозным устройством.













